Building robots is a bit of a passion of mine; from roamers to arms and walkers. I'm going to write about some of them starting with a multi-part post about a robotic arm. In this post I will describe the various bits and contruction of the arm.
I'm using Dynamixel AX-12A servos. These are slightly different to your usual hobby servos as are controlled via a serial bus rather than with PWM signals. This makes them much easier to wire together as they can be daisy chained. They can also feedback information about themselves to the controller such as thier temperature, load and position. These servos can be interfaced to a PC in several different ways. I will be using a USB2Dynamixel controller that interfaces from USB to a signal the Dynamixel servos can understand.
To construct the arm I am using plastic brackets from the Robotis Bioloid Construction Kit. This provides lots of different brackets and attachments for connecting servos together to form arms, hexapods and bipeds. I looked various different arms available from Crustcrawler and LynxMotion and settled on a 9 servo design, one to rotate the base, two for the main shoulder joint, three more joints in the arm, one write rotate and two for the gripper. Robotis provide various bits of software. RoboPlus Motion: using this servos can be dynamically set to test positions. This is useful for working out different servo settings for various positions that the arm will need to be in. RoboPlus Task: a C like programming language. I will not be using this to control the arm as it is limited in features. Instead I will be using a Python library for control.
| Full arm in crouched position | 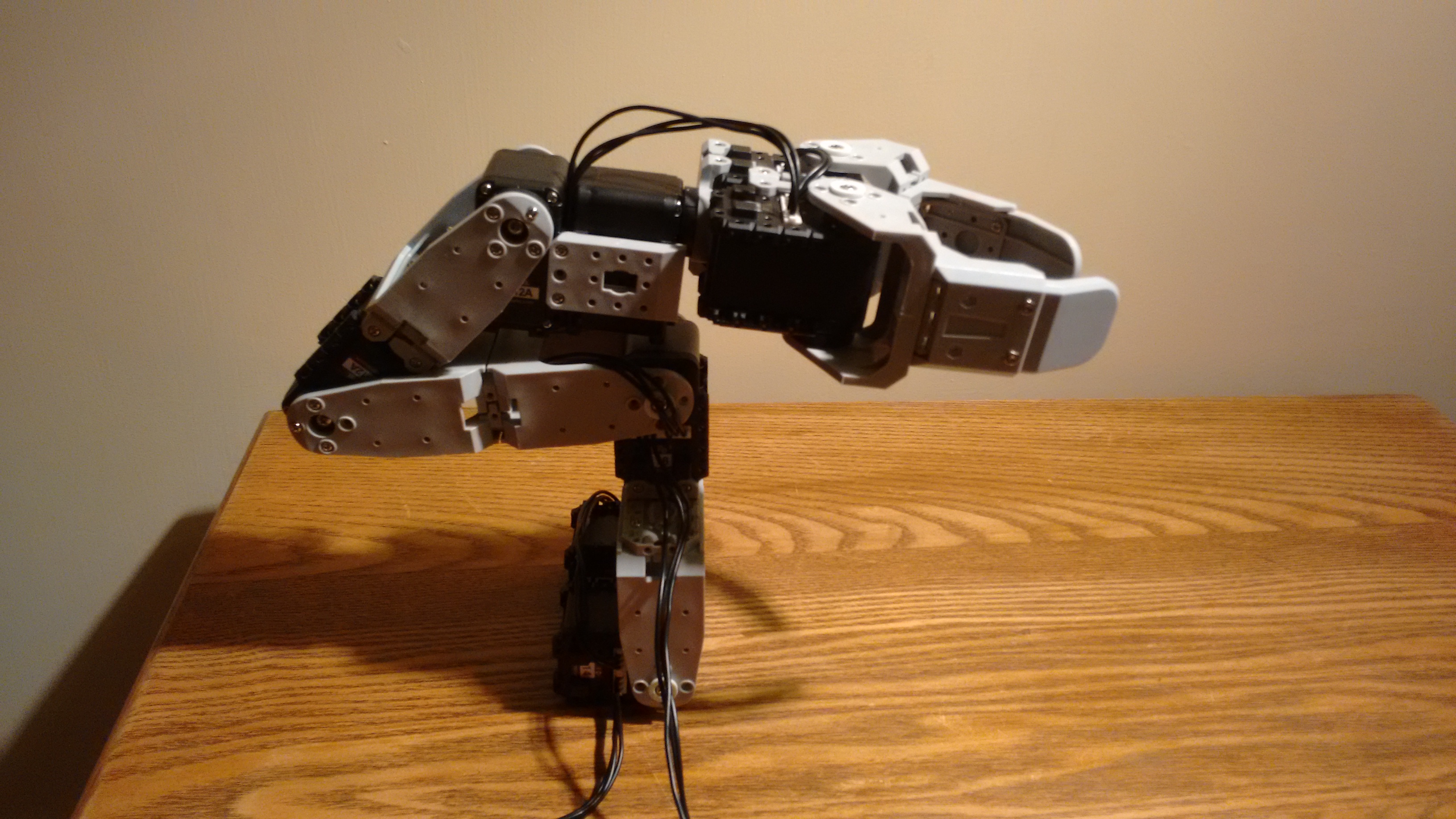 |
| Detail of the gripper | 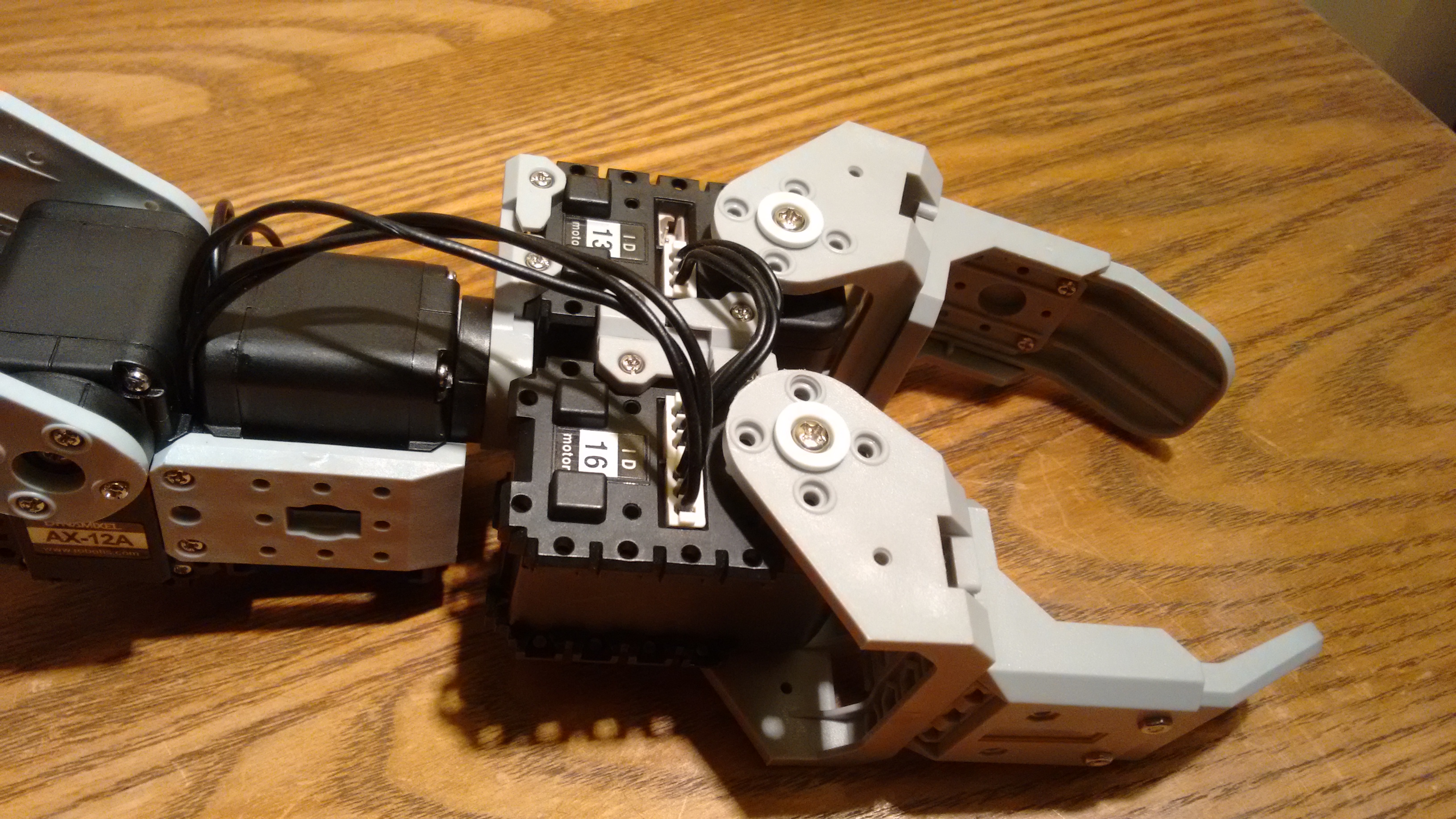 |
| Detail of the shoulder |  |
Comments