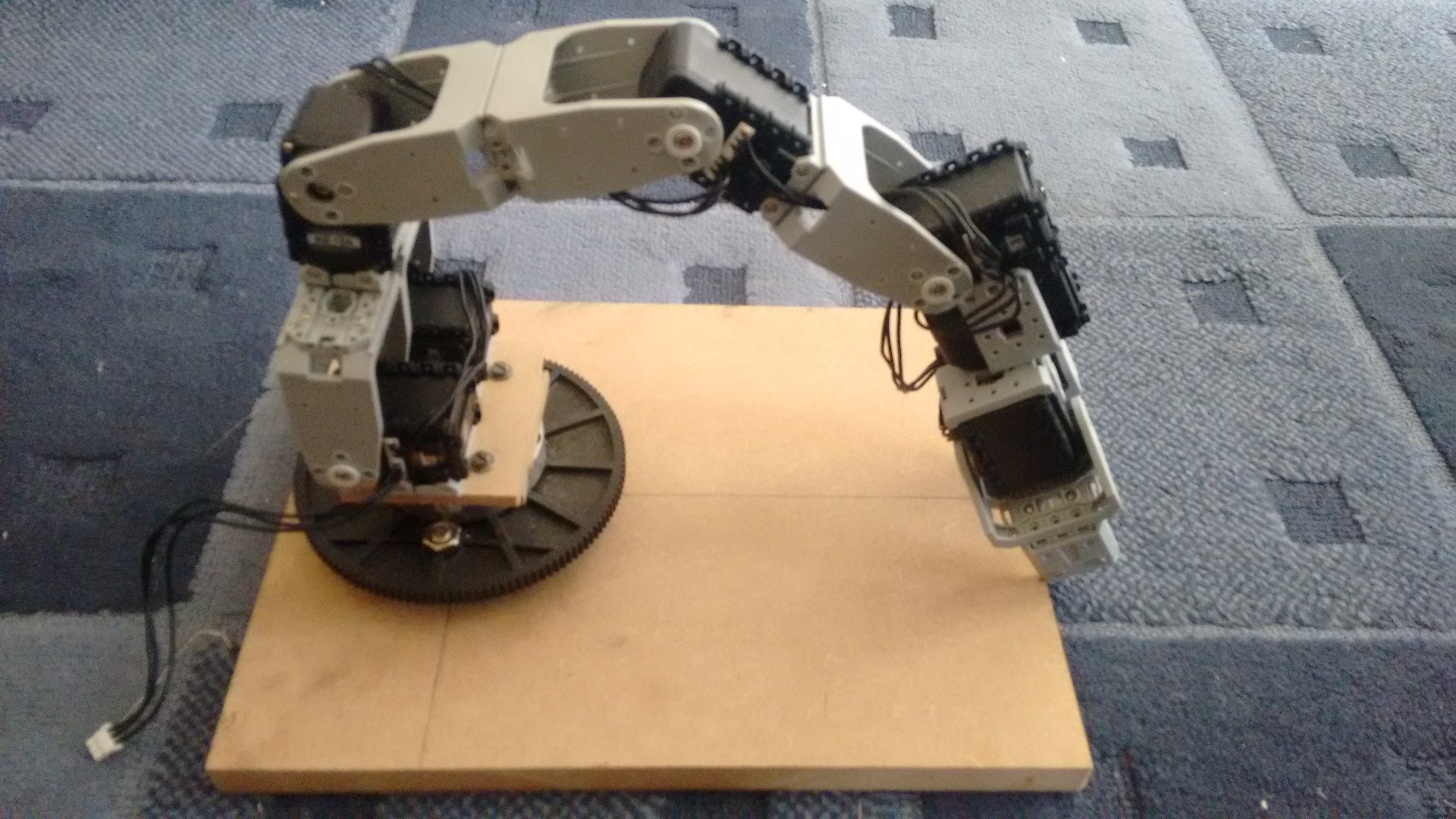
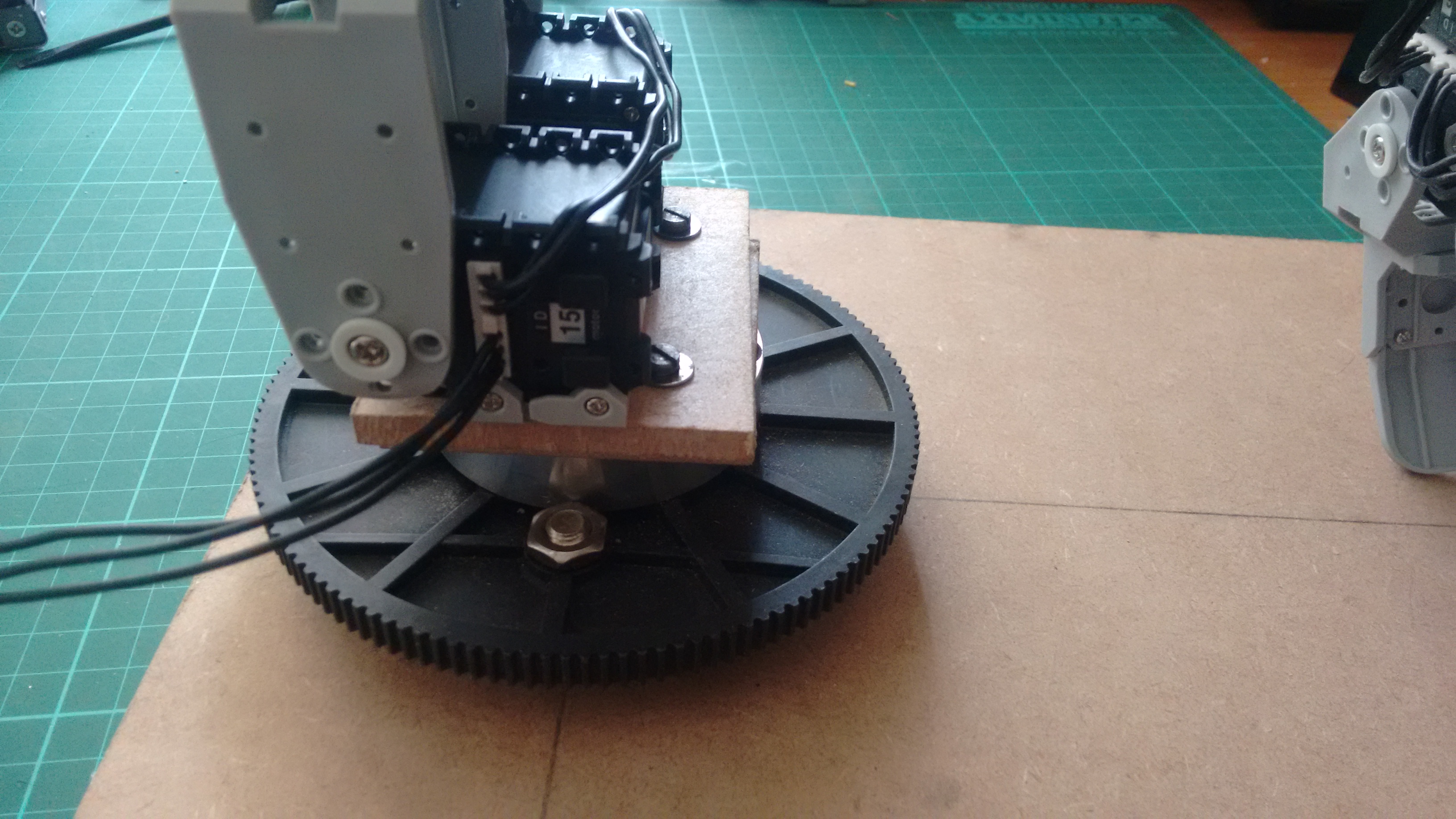
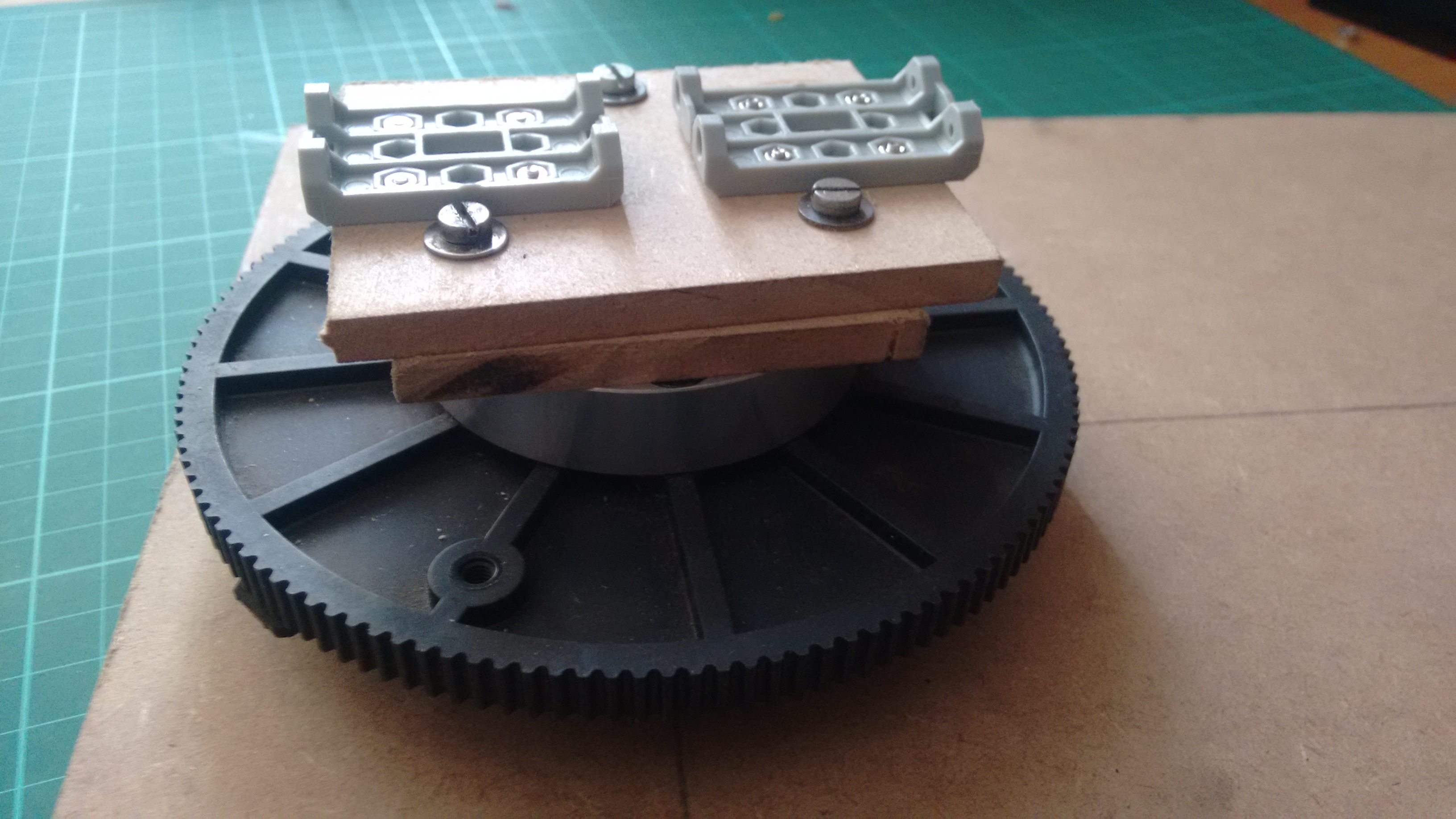
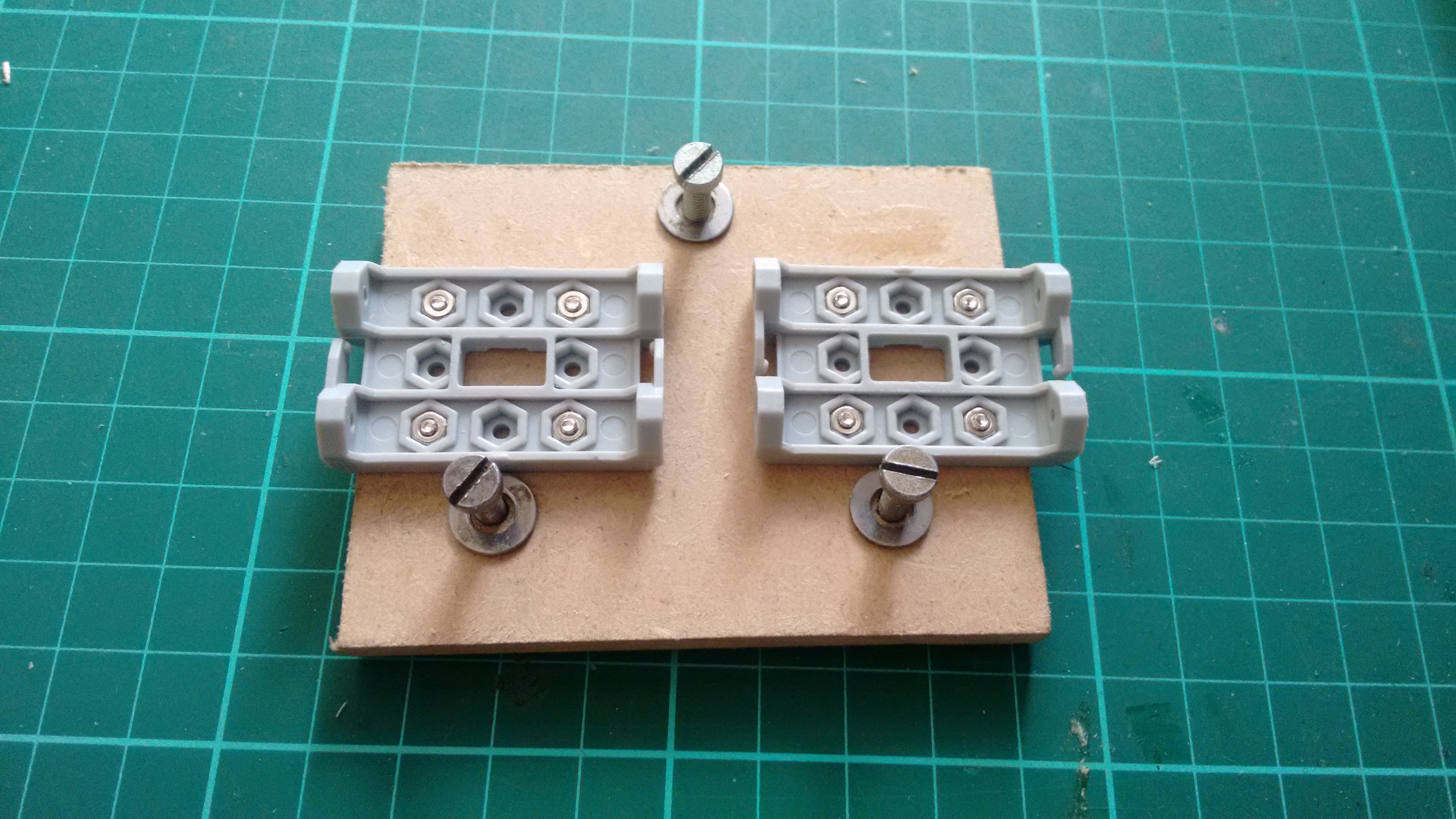
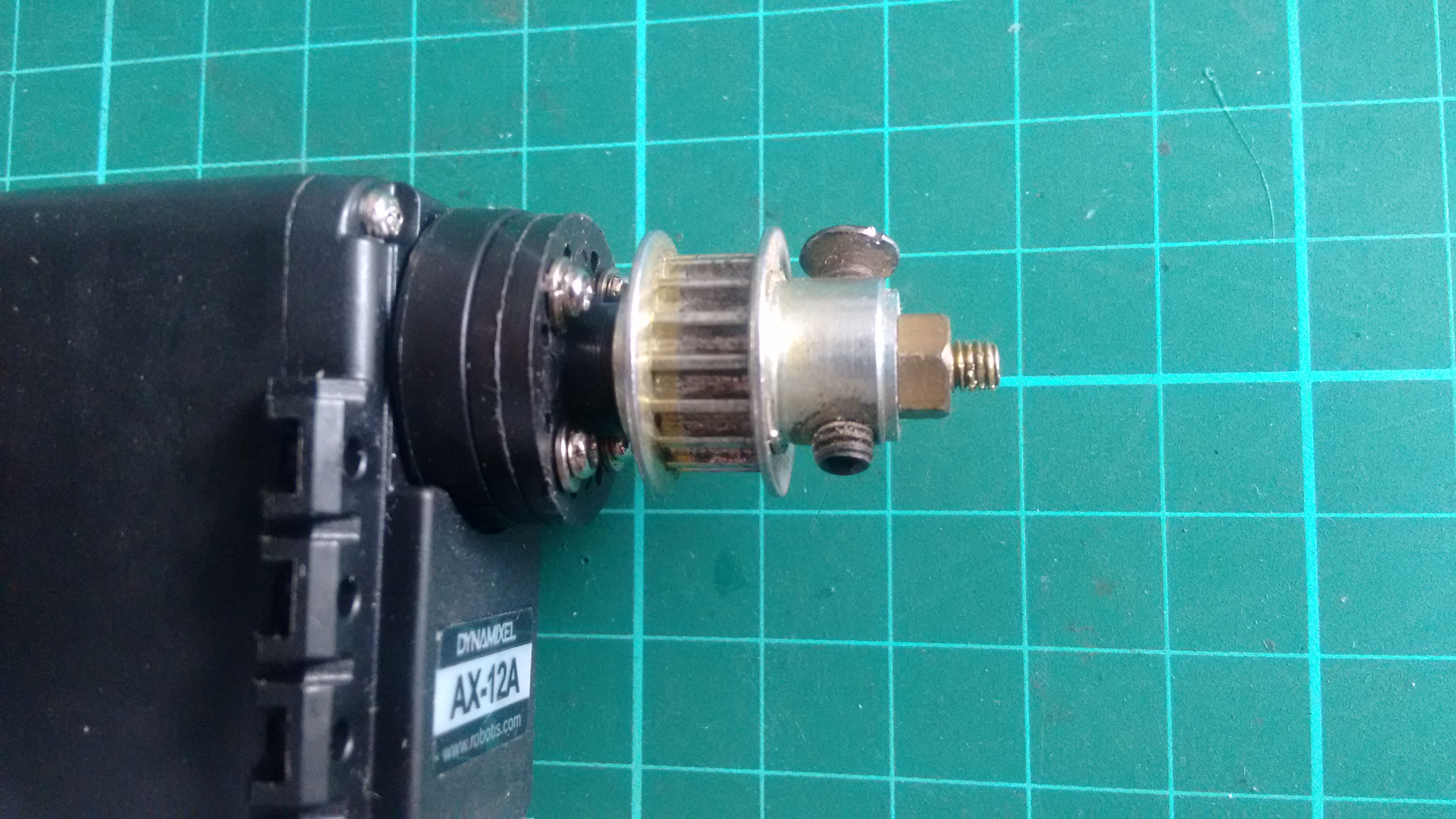
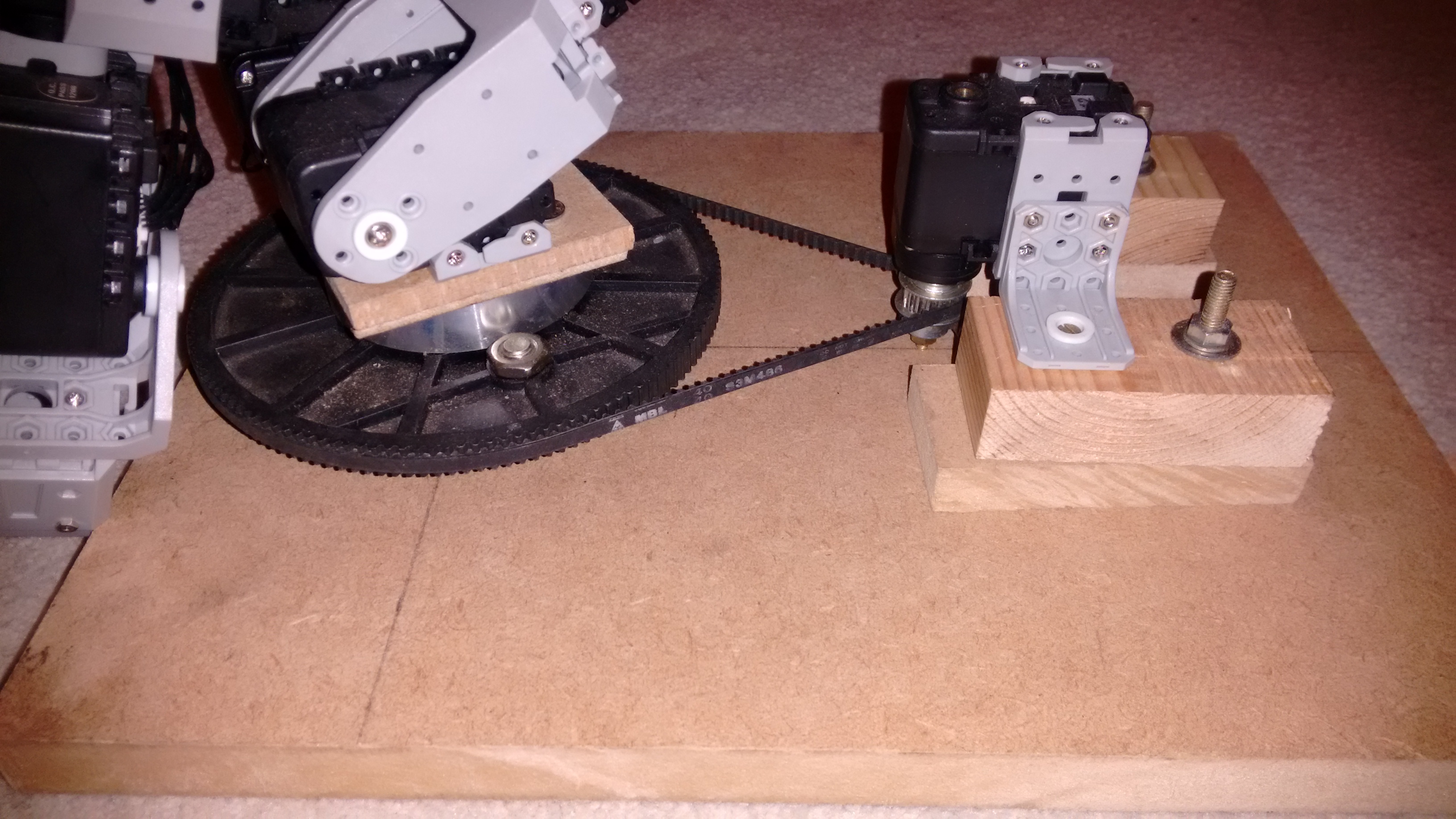
I finally got around to putting my robot arm on a turntable. In a stroke of luck I found what looked to be perfect in a parts bin for stepper motors at my local Makerspace It looks like a large gear on top of a bearing and included a toothed belt and accompanying toothed pulley. The servo shaft needed to be packed out with some copper tube to make it the right diameter for the pulley. I've then mounted it upside down on some wooden blocks to get it at the same level as the turnable gear. It seems to work rather well! Check out the photos below and let me know what you think.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Comments